HOME / FIELD LOG
Field Log
Build notes, deep-dives and conference talks from the workbench — cloud architecture, firmware, robots and the occasional cat-related incident. 47 entries and counting.
▶ FEATURED2026.05.26 · 3 MIN
Voice to Robotics: Driving a Sphero RVR — AWS User Group Wellington
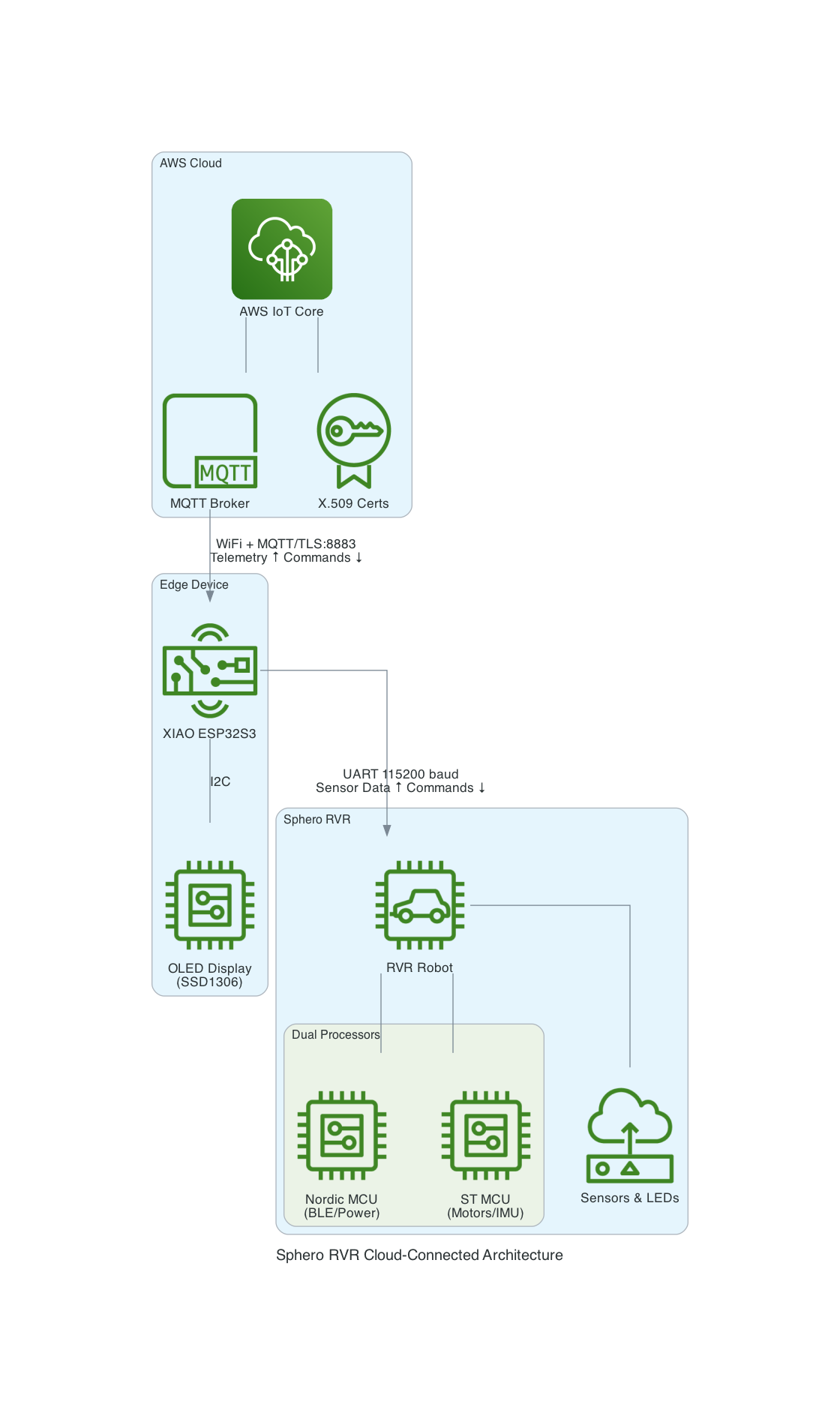
Slides and notes from my AWS User Group Wellington meet-up talk on driving a Sphero RVR with your voice — Amazon Nova 2 Sonic, AWS IoT Core, AppSync, Amplify Gen 2, and a XIAO ESP32-S3 bridge.
AWSBedrockNova SonicAmazon Nova
Open Blog →
//01
Transmissions
2026[ 12 ENTRIES ]
2026.05.26Voice to Robotics: Driving a Sphero RVR — AWS User Group WellingtonTALK3 MIN2026.05.26Voice to Robotics: Driving a Sphero RVR5 MIN2026.04.29Voice to Robotics: Fingerspelling American Sign Language — AWS User Group WellingtonTALK2 MIN2026.04.29Voice to Robotics: Fingerspelling ASL3 MIN2026.03.15Real-Time Voice to Sign Language Translation - Part 3: Edge AI Agent with Strands Agents on NVIDIA Jetson13 MIN2026.03.14Real-Time Voice to Sign Language Translation - Part 2: Cloud Infrastructure with AWS CDK, IoT Core, and AppSync11 MIN2026.03.13Real-Time Voice to Sign Language Translation with Amazon Nova 2 Sonic and Pollen Robotics Amazing Hand - Part 1: Frontend and Voice Processing16 MIN2026.03.03Agentic based Over-The-Air Firmware Management of Seeed Studio XIAO ESP32S3 IoT Device Firmware using Amazon AgentCore and Strands Agents8 MIN2026.02.28UART Communication Between Seeed Studio XIAO ESP32C6 and NVIDIA Jetson Nano Super1 MIN2026.01.24I Got Me One of These - NVIDIA Jetson AGX Thor Developer Kit1 MIN2026.01.19Real-Time Voice Chat with Amazon Nova Sonic using React and AWS Amplify Gen 28 MIN2026.01.19Cloud-Connected Sphero RVR Robot with AWS IoT Core and Seeed Studio XIAO ESP32S34 MIN2025[ 06 ENTRIES ]
2025.09.28AWS Community Day 2025 Aotearoa New Zealand SlidesSLIDES1 MIN2025.09.18AWS Community Day 2025 Aotearoa New ZealandTALK1 MIN2025.08.21Controlling Hugging Face LeRobot SO101 arms over AWS IoT Core using a Seeed Studio XIAO ESP32C31 MIN2025.07.13Good Times1 MIN2025.06.04AWS Sydney Summit 2025TALK1 MIN2025.05.03Iron Man Mark 3 Helmet1 MIN2024[ 09 ENTRIES ]
2024.10.24Iron Man Mark 85 Faceplate1 MIN2024.10.22Let’s build an Iron Man Suit with AWS IoT1 MIN2024.10.02AWS IoT Core – Iron Man – Part 11 MIN2024.07.21Rockit Apple payslip Analyzer with GenAI Chatbot using Bedrock and Streamlit5 MIN2024.06.20Coming soon at a desk near you…1 MIN2024.02.25FeedMyFurBabies – Storing Historical AWS IoT Core MQTT State data in Amazon Timestream3 MIN2024.02.18FeedMyFurBabies – Send and Receive MQTT messages between AWS IoT Core and your micro-controller – I am switching from Arduino CPP to MicroPython8 MIN2024.02.11FeedMyFurBabies – Using Custom Resources in AWS CDK to create AWS IoT Core Keys and Certificates10 MIN2024.02.02FeedMyFurBabies – I am switching to AWS CDK7 MIN2023[ 04 ENTRIES ]
2023.07.16Getting the Golden Jacket with my Cat Squad1 MIN2023.03.18FeedMyFurBabies – Event-Sourcing using Amazon EventBridge9 MIN2023.01.274×4 fun with a bit of Iot, vlogging and Machine Learning – Part 17 MIN2023.01.01Snacks1 MIN2022[ 11 ENTRIES ]
2022.11.24Feed My Fur Babies – AWS Amplify and Route534 MIN2022.09.22AWS DeepRacer9 MIN2022.05.28Breaking Down Monolithic Subnets6 MIN2022.05.28Leveraging AWS Prefix Lists8 MIN2022.05.28Maintain a Prefix List of EC2 Private IP Addresses using EventBridge8 MIN2022.05.28Work-around for cross-account Transit Gateway Security Group Reference9 MIN2022.05.06Swiss Cheese Network Security Factorising Security Group Rules into NACLs and Security Group Rules9 MIN2022.04.03Smart Cat Feeder – Part 45 MIN2022.02.06Planting something….1 MIN2022.02.04Smart Cat Feeder – Part 34 MIN2022.01.21Hosting multiple subsites under a serverless website instance8 MIN