Voice to Robotics: Driving a Sphero RVR — AWS User Group Wellington
· 3 min read

These are the slides from my talk at the AWS User Group Wellington meet-up on 26 May 2026, walking through how I built a real-time pipeline that listens to spoken commands in the browser and drives a Sphero RVR — exact distances, exact angles — with live telemetry streaming back into the UI.
Tip: click into the slides and use the arrow keys to navigate, or hit the fullscreen button for the best experience.
What the talk covers
- The problem — turning a spoken sentence into a precise, exact-distance robot motion in real time
- Voice in — Amazon Nova 2 Sonic bidirectional streaming with forced tool use as a "robot controller"
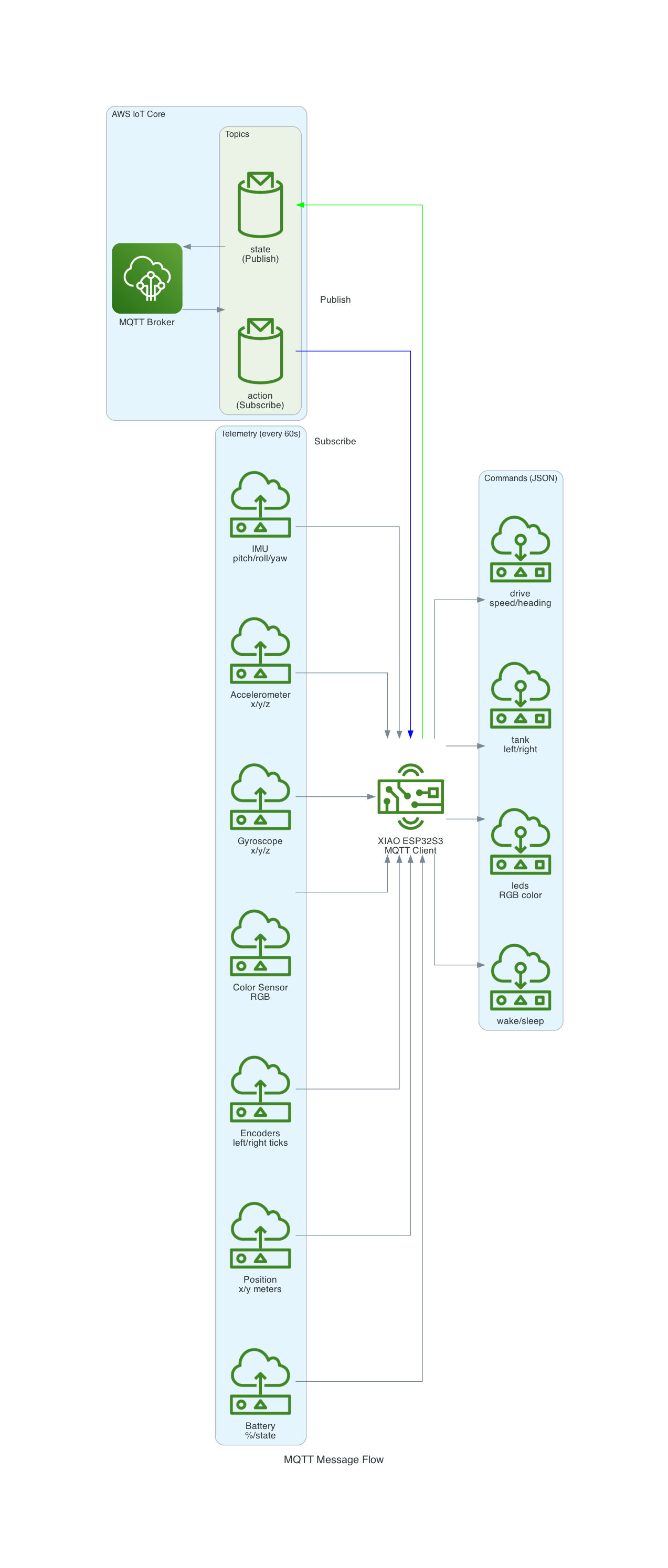
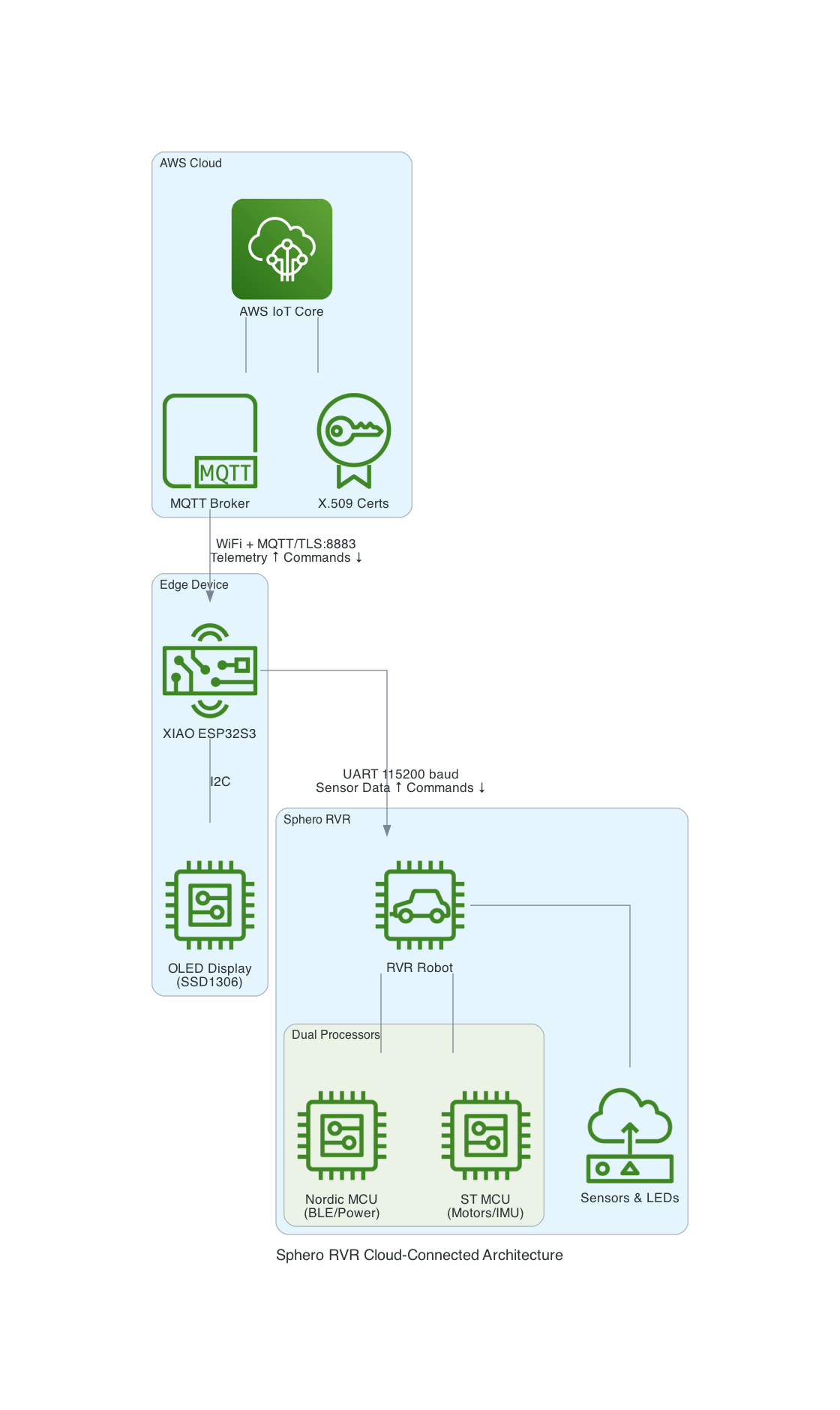
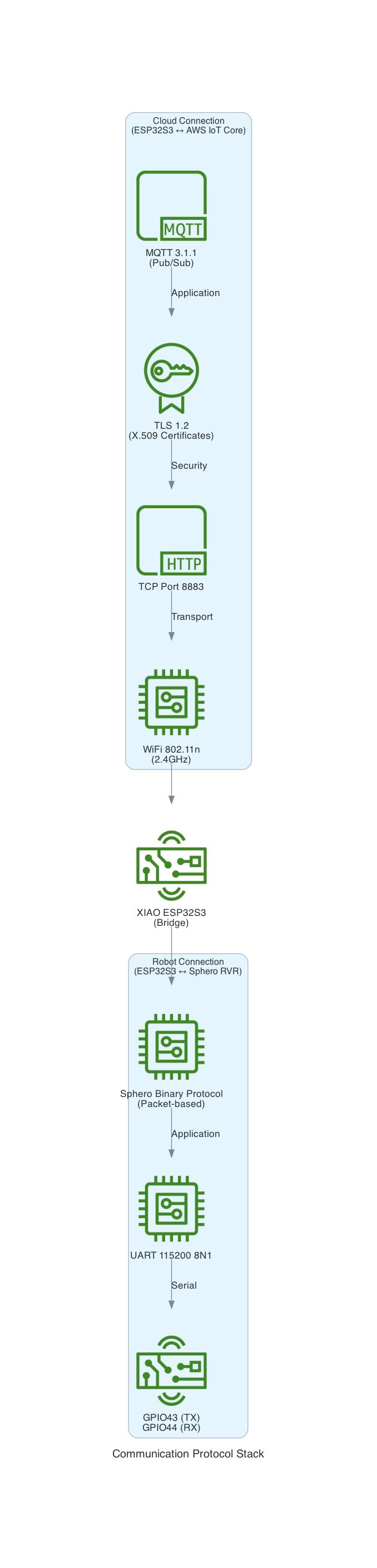
- Commands down — browser → AWS IoT Core MQTT publish via temporary Cognito credentials, no backend
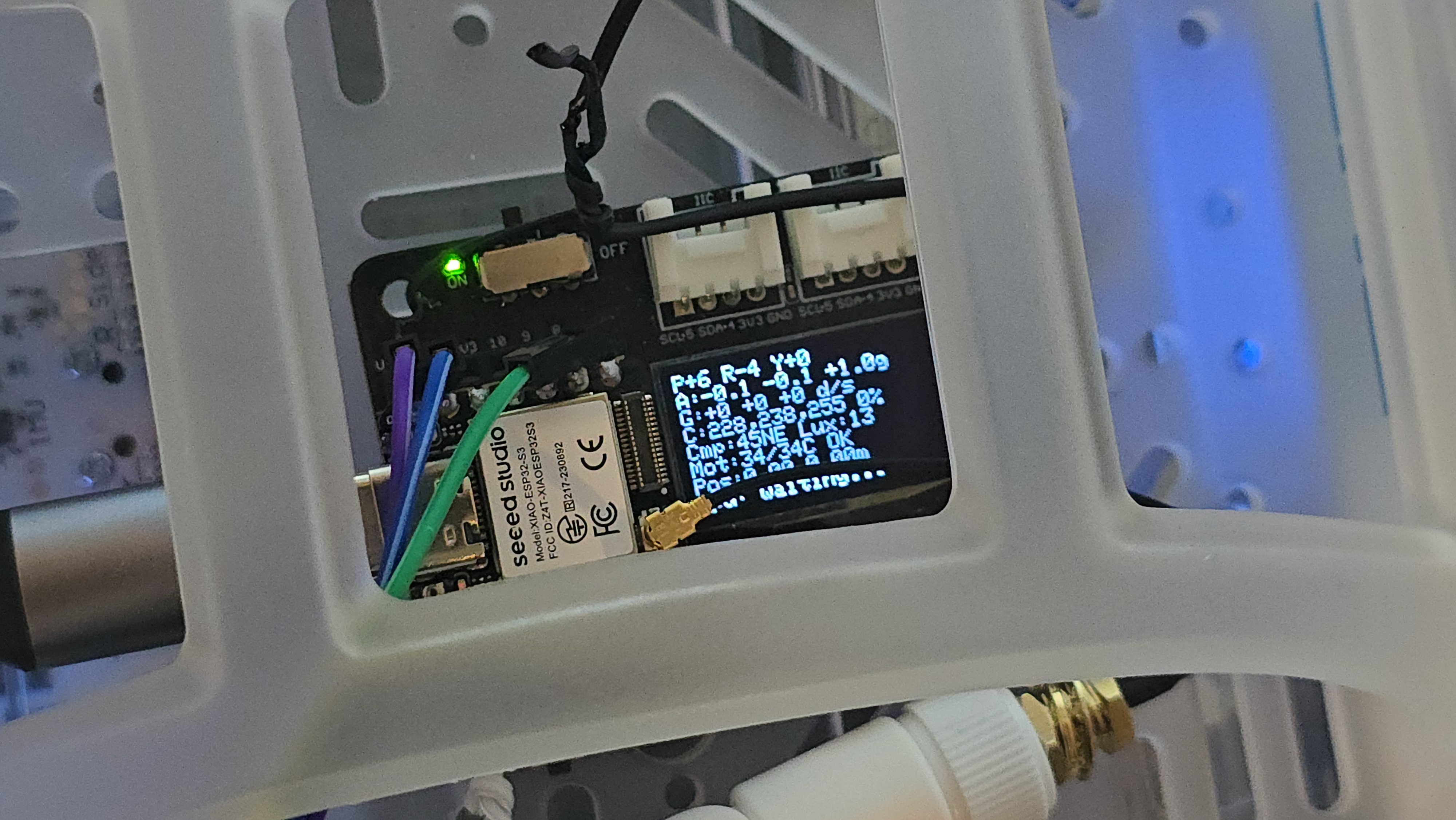
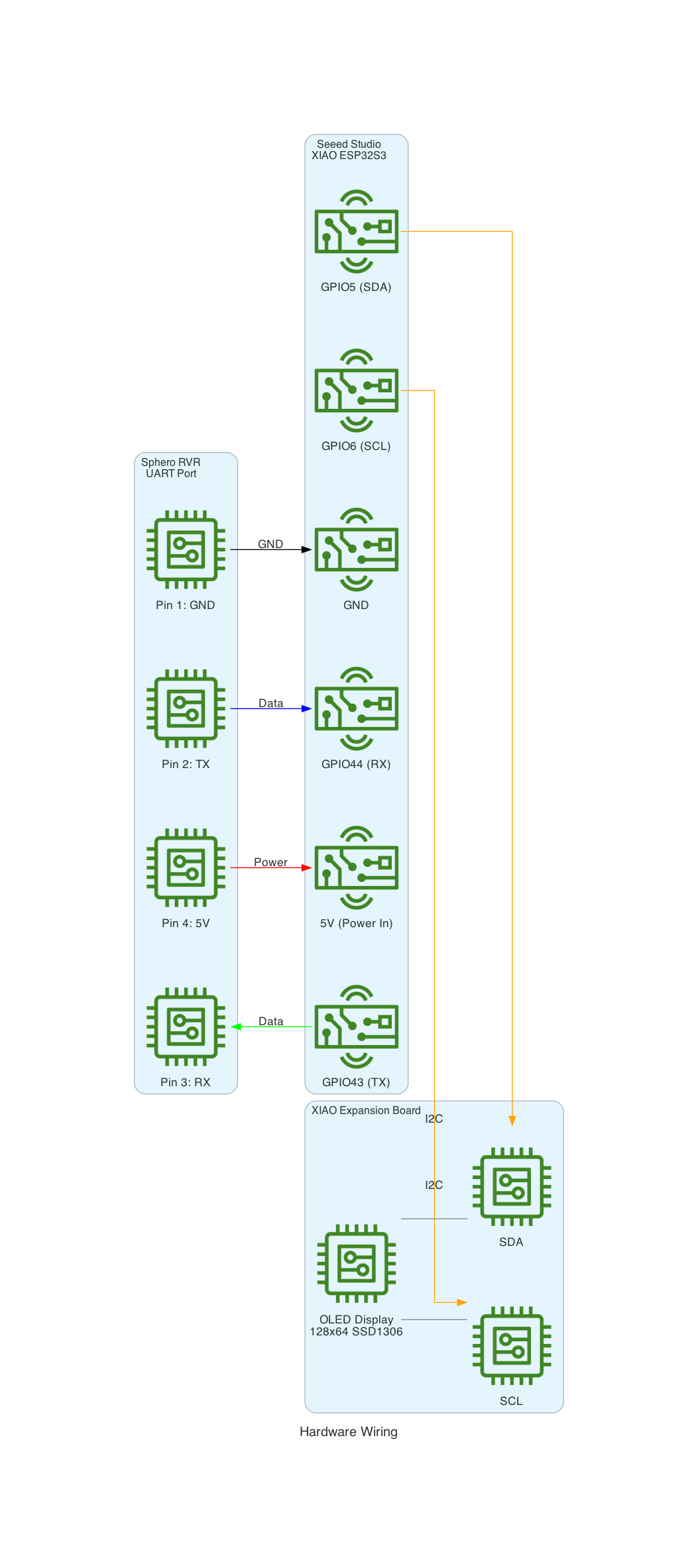
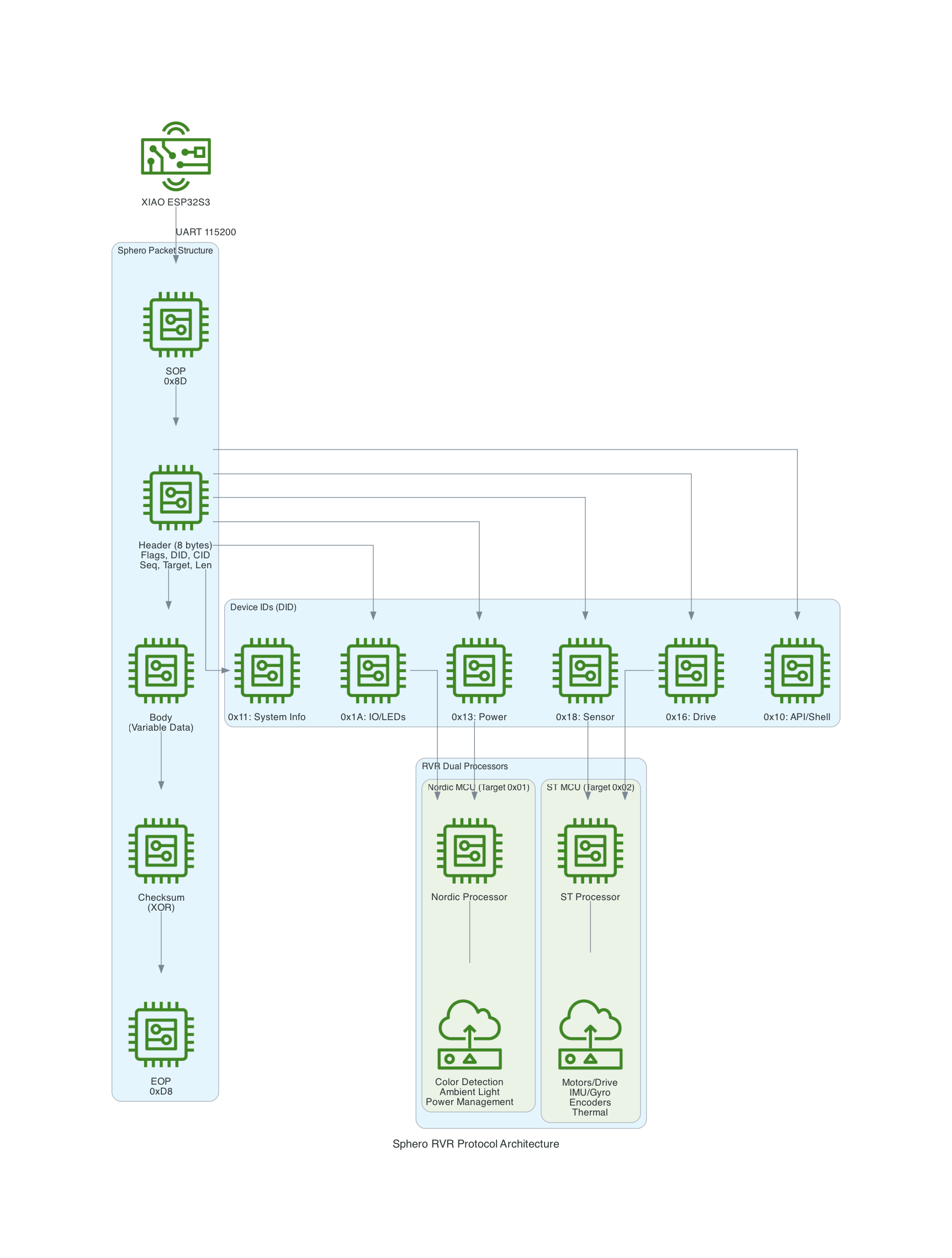
- The edge — a Seeed Studio XIAO ESP32-S3 bridging WiFi/MQTT to the Sphero RVR's UART SDK
- Maneuver framework — locator-based distance and IMU-based turn, both running on the device, so "1 metre" actually means 1 metre
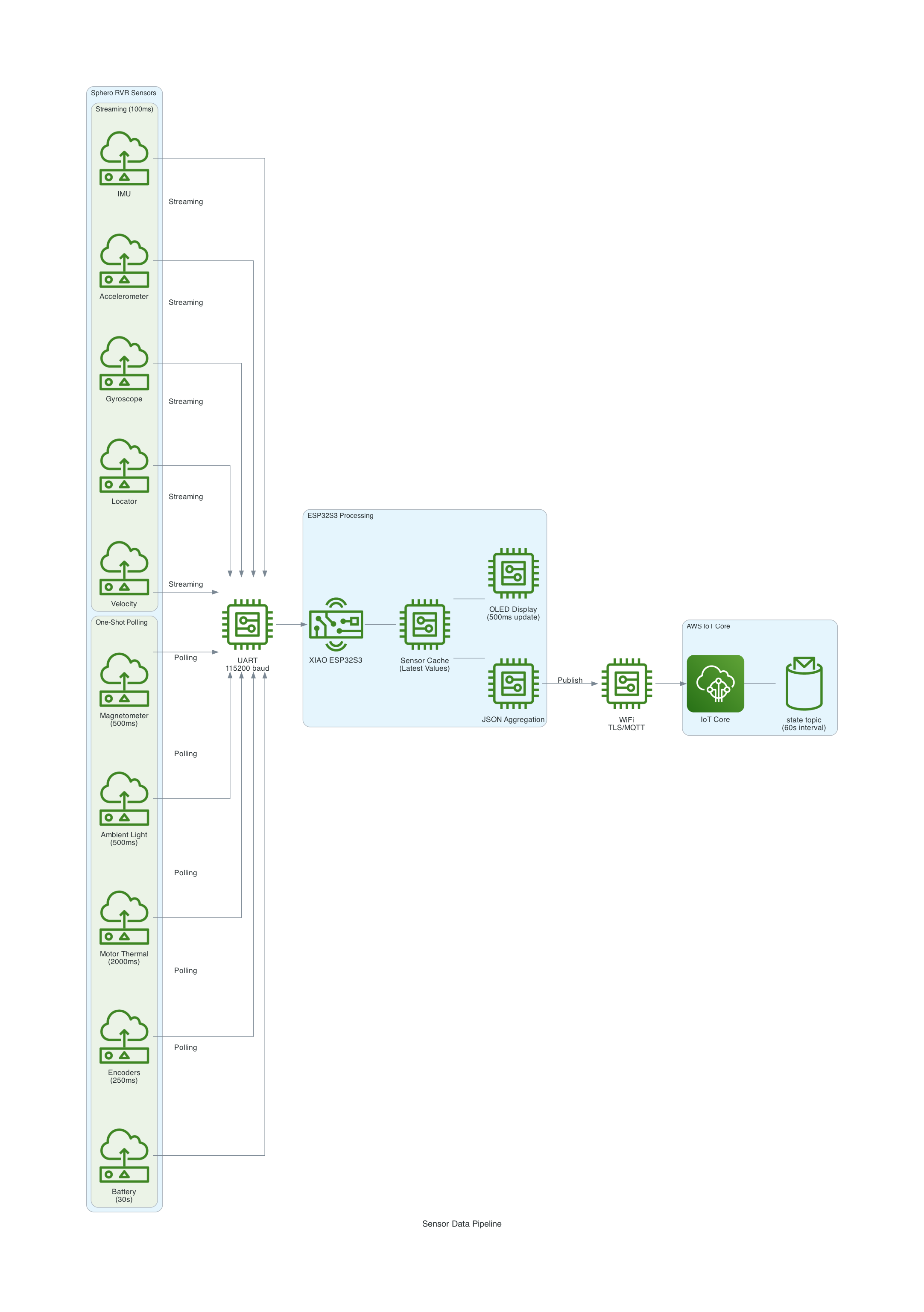
- Telemetry up — an AWS CDK stack tying IoT Rule → Lambda → AppSync → DynamoDB → live GraphQL subscription back into the React UI
The three repos behind the demo
arduino-aws-iot— ESP32-S3 firmware. The talk focuses on thesphero_rvrdevice group, including the new maneuver executor (forward,reverse,turn,cancel) layered on top of the existingdriveD-pad.cdk-iot-sphero-rvr-streaming— AWS CDK stack that filters the RVR telemetry MQTT topic, flattens the nested payload in Lambda, and forwards it as a GraphQL mutation to an Amplify-managed AppSync API.amplify-react-nova-sonic-voice-chat-sphero-rvr— React + AWS Amplify Gen 2 frontend. The same Cognito identity is used for Bedrock streaming, IoT publish, and the AppSync subscription that surfaces live telemetry.
Related deep-dive posts
If you want background on the building blocks before the talk:
- Sphero RVR with AWS IoT Core on a Seeed Studio XIAO ESP32-S3
- Real-Time Voice Chat with Amazon Nova Sonic, React and AWS Amplify Gen 2
Thanks
Big thanks to the AWS User Group Wellington organisers and everyone who came along — happy to chat about any of the code, the maneuver framework, or where the project goes next.